(2020-02-06) Début: mon coéquipier et moi, après une discussion pour savoir quel projet nous allions faire, avons choisi le projet de la main robotisée. Ensuite, on a échangé nos idées sur les caractéristiques que devaient avoir la main robotisée. Par exemple, que le poignet de la main robotisée puisse bouger dans tous les sens et que la main soit contrôlée à distance par un gant. Puis, une fois nos idées regroupée, nous avons regardé des vidéos* sur Youtube, afin voir si notre projet était faisable.
*Lien : https://www.youtube.com/watch?v=jxlzY88Pwbg, https://www.youtube.com/watch?v=CfB8Mrh1dSI.
(2020-02-10) : J’ai regardé deux vidéos* que mon coéquipier m’a montré. À partir de celles-ci, on a décidé de faire un gant qui serait équipé de capteurs infrarouges qui permettrons à deux caméras, pour une meilleur précision, d’enregistrer les mouvements du gant et des les envoyer à la main robotisée, afin qu’elle les exécute.
*Lien : https://www.youtube.com/watch?v=aTMFBnEdA4I, https://www.youtube.com/watch?v=qLqq5EulHBk.
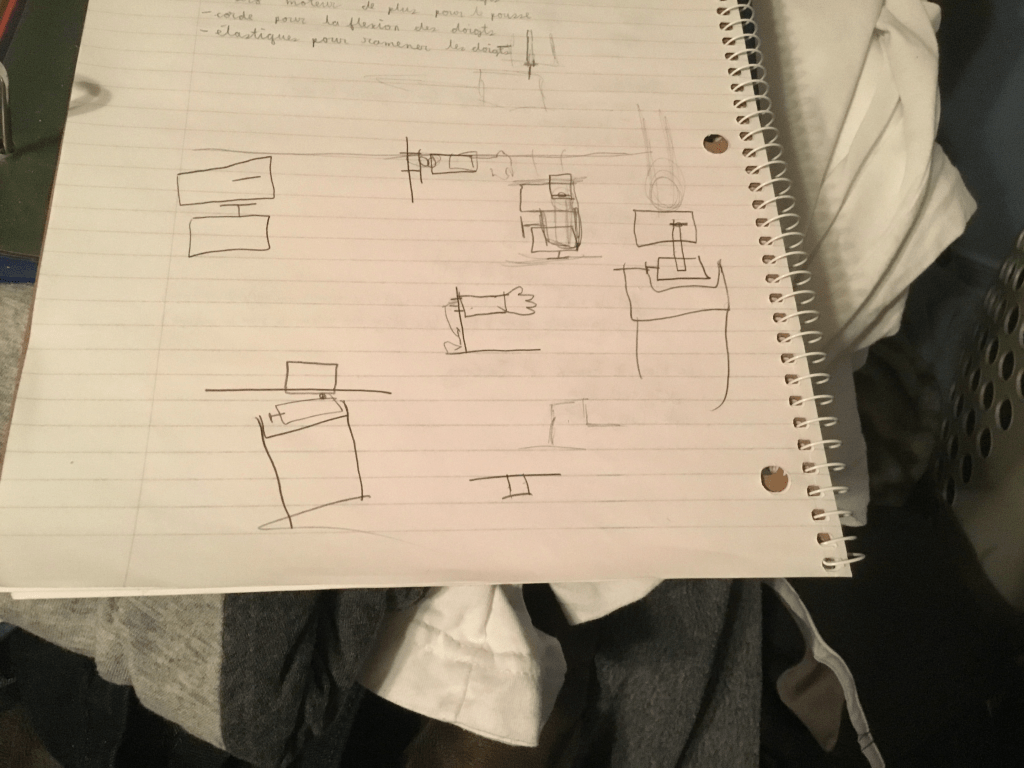
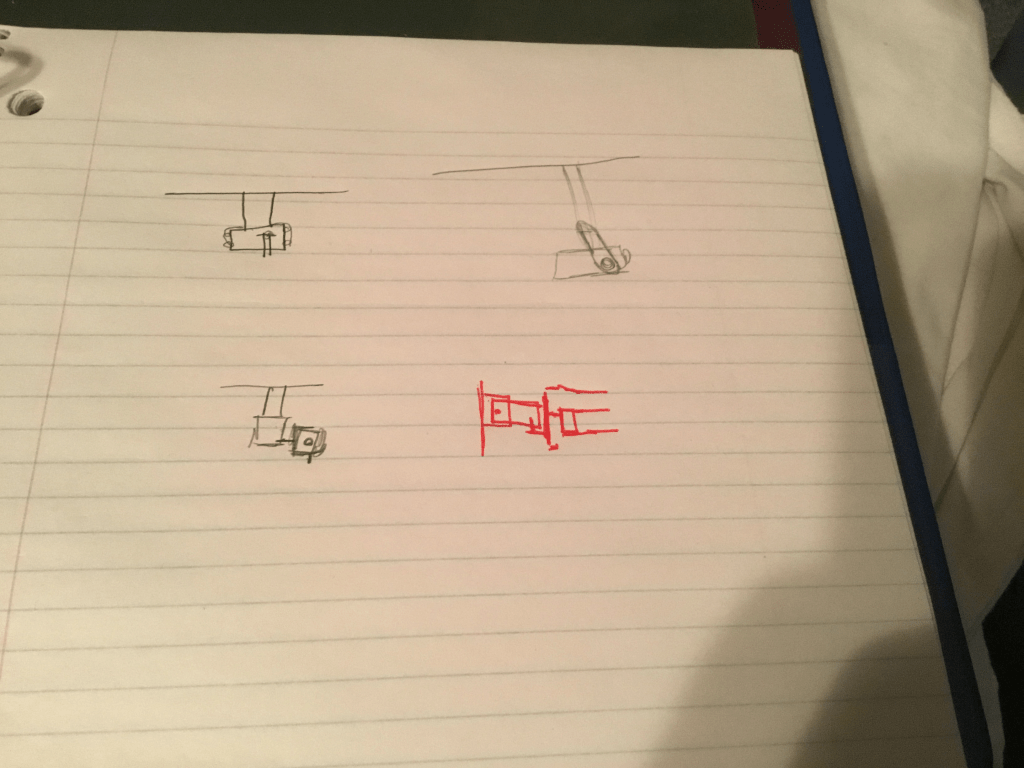
(2020-02-13) : On a décidé de faire une main robotisée rattachée à un avant bras, où cet avant bras serait également rattaché à un support vertical. Puis, On a décidé aussi, à l’aide de dessins, que nous allions utiliser trois cerveaux moteurs, afin de relier la base de l’avant bras à son support verticale et de permettre à l’avant bras de pouvoir bouger dans toutes les directions possible. Ensuite, J’ai regardé sur le site d’Amazon des capteurs infrarouges, afin de me donner une idée des différents capteurs infrarouges qu’il y a. Pour terminer, j’ai encore regardé sur le site d’Amazon des cerveaux moteurs pour m’assurer, qu’avec trois cerveaux moteurs, qu’il est possible d’amener l’avant bras à bouger dans toutes les directions et qu’il existe des cerveaux moteurs qui peuvent supporter le poids de l’avant bras.
Lien : https://www.amazon.ca/-/fr/Annimos-Digital-Couple-%C3%A9tanche-Mod%C3%A8le/dp/B0769DFJVK/ref=sr_1_10?__mk_fr_CA=%C3%85M%C3%85%C5%BD%C3%95%C3%91&crid=2QF15A9B50GT9&keywords=servo+motor+arduino&qid=1582343669&sprefix=servo+motor+a%2Caps%2C168&sr=8-10, https://www.amazon.ca/s?k=capteur+infrarouge&__mk_fr_CA=%C3%85M%C3%85%C5%BD%C3%95%C3%91&ref=nb_sb_noss_1.
(2020-02-16) : j’ai reçu de mon coéquipier un vidéo provenant de Youtube qui montre une personne qui utilise seulement des cercles blancs sur son gant pour permettre à ses deux caméras de capter les mouvements de la main à partir du gant. Puis, ces mouvements sont traduis par un logiciel. Face à cette possibilité, on était sur le point de planifier d’utiliser la méthode de la personne dans la vidéo. Par contre, de plus en plus qu’on en parlait, on a réalisé qu’il était impossible et trop dure pour nous de faire la conception de la main robotisée et de faire le programme, qui est pour nous Prossessing, dans le temps répartie. Donc, vue que nous stagnons sur comment faire le gant et sur quels capteurs infrarouge il nous fallait pour que les caméras captent les mouvements du gant, nous avons abandonné l’idée d’utiliser deux caméras qui captureraient les mouvements des capteurs infrarouges sur le gant.
Lien : https://www.youtube.com/watch?v=vduzIFWUCJI&feature=share.
(2020-02-17) : On cherchait une nouvelle façon de contrôler, à l’aide d’un gant, notre main robotisée. Puis, on sait souvenu d’un vidéo où le personne avait mis des flex sensors sur les doigts de son gant pour contrôler les doigts de sa main robotisée, puisque les flex sensors permettent de capter le mouvement de quelque par courbure. Donc, on a pensé à mettre sur chacun des doigts de notre gant des flex sensors. Ensuite, il nous restait cas savoir quel type de capteur à utilisé pour pouvoir enregistrer le mouvement de notre poignet pour que la main robotisée face de même. Alors, j’ai cherché et j’ai trouvé l’accéléromètre qui envoie des données sur son angle. Puis, mon coéquipier m’a montrer, à l’aide d’une vidéo, comment faire pour faire bouger chacun des doigts de la main robotisée. À l’aide de cette vidéo, on a décidé d’attacher à chacun des doigts une corde qui serait reliée à un cerveau moteur positionné, excepter le pousse qui en aurait deux, sur l’avant bras. Par contre, vue l’ampleur du projet et le travail que représente la programmation, par Prossessing, de tous ces cerveaux moteurs, on a abandonné l’idée de faire bouger tout l’avant bras et on a décidé plutôt de ne faire bouger que la main. À la fin du cours, on a demander à notre professeur si les flex sensors seraient suffisants pour bien capter les mouvements des doigts et il nous a répondu que les flex sensors ne sont pas vraiment précis. Donc, on ne sait pas si nous allons vraiment utiliser des flex sensors.
Lien : https://www.youtube.com/watch?v=qLqq5EulHBk, http://www.lafabriquediy.com/tutoriel/liste-des-capteurs-229/, https://www.youtube.com/watch?v=2g9ChZ0CgmQ, https://www.youtube.com/watch?v=t52edTD9RA0.
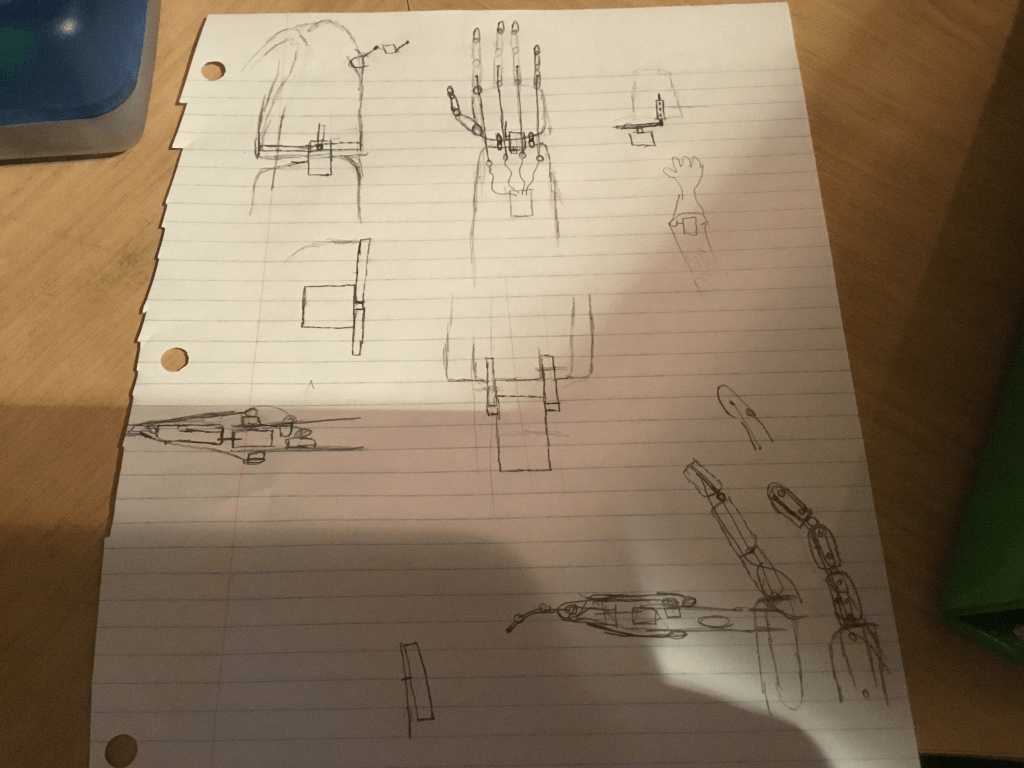
(2020-02-18) : je fais des recherches sur Youtube pour trouver des personnes qui utilisent un gant équipé de flex sensors pour contrôler leur main robotisée. Ces recherches avait pour but de voir si les flex sensors étaient assez précis pour pouvoir contrôler la main robotisée. Puis, j’en ai trouver une qui m’a permis d’y croire un bref instant. D’autre part, à un moment de la journée, mon coéquipier et moi on s’est croisé et celui-ci m’a montrer une vidéo, où une personne montre la conception de sa main robotisé. À partir de ça, j’ai fait des schémas de main robotisée, afin de nous donner des idées de conception et nous avons déterminer qu’il serait plus précis pour le gant d’utiliser aussi des angle sensors.
Lien : https://www.youtube.com/watch?v=8HQ-CtgXudY, https://www.youtube.com/watch?v=uEd2B7fS8Eg&list=LLhw-FJh5vEyKIuNKczTC_8Q&index=7&t=52s.
(2020-02-19) : J’ai cherché des logiciels qui nous permettraient de faire le schéma du gant et de la main robotisée de façon détaillée et je suis tomber sur Freecad. Ensuite, je suis allé sur Amazon pour trouver un cerveau moteur qui nous permettrait d’avoir une bonne connexion et un bonne solidité entre la main et l’avant bras robotisé pour avoir un bon poignet.
Lien : https://www.amazon.ca/-/fr/Hobbypark-Hdr315-Digital-Couple-supports/dp/B01H6JRK96/ref=sr_1_25?__mk_fr_CA=%C3%85M%C3%85%C5%BD%C3%95%C3%91&keywords=servo+motor&qid=1582412190&sr=8-25, https://www.youtube.com/watch?v=R0Ck1OOgs8k.
(2020-02-20) : Mon coéquipier et moi avons réécris le but du projet, car le contrôle de la main robotiser ne se fera plus par la captation des capteurs introduis dans le gant, une captation effectuée par deux caméras, mais plutôt des capteurs de mouvements. On a aussi décidé de ne pas mettre uniquement des flex sensors sur le gant, mais aussi des angle sensors au niveau des jointures pour avoir une plus grande précision dans la capture des mouvements. Puis, on a choisi de mettre deux cerveaux moteurs, reliés à une corde différente, par doigt pour avoir une plus grande maniabilité au niveau des doigts, ce qui nous fait 10 cerveaux moteur par doigt de la main robotisée. Ensuite, j’ai essayé de comprendre le logiciel Freecad à l’aide d’une vidéo. Ensuite, on a commencé à faire le plan de notre projet.
Lien : https://www.youtube.com/watch?v=R0Ck1OOgs8k.
(2020-02-21) : j’ai fais le calendrier des tâches que je devais faire les deux prochaines semaines et j’ai commencé à écrire notre journal de bord, mais je ne l’ai pas fini.
(2020-02-22) : J’ai fini d’écrire les parties qui me manquaient dans mon journal de bord.
