(2020-02-06): C’est le début de notre projet. Jérémy et moi avons décidé de faire une main robotique qui fait les mêmes mouvements que nous faisons avec notre main. Pour se faire nous avons commencé à regarder comment le faire. En discutant nous avons conclu sur certaines caractéristiques que la main doit avoir. Dont chaque doigt doit être capable d’être contrôlé individuellement et le contrôler à distance.
(2020-02-10): Nous avons fait de la recherche chacun de nos côté pour trouver une bonne façon de contrôler la main à distance. Nous avons vu dès le départ plusieurs personnes utiliser des Flex sensor. Cependant, nous avons aussi vu des capteurs à infrarouge. Cela nous intriguait donc nous avons laissé tomber les Flex sensor pour faire les capteurs infrarouges. Lien: https://www.youtube.com/watch?v=aTMFBnEdA4I
(2020-02-13): Le projet de faire une main qui fait les mêmes mouvements des doigts que nous était bien. Par contre, on a discuter et on sait dit pourquoi pas avoir un bras à la verticale qui est aussi capable de se déplacer. Pour mieux expliquer, le bras serait attaché a une plateforme dont le bras aurait comme position de base la verticale. Il serait capable de rotationner vers le haut ou bas et vers la droite ou la gauche. Tous ses mouvements seraient capté par un accéléromètre situé sur l’avant bras de l’usagé.
(2020-02-15): J’ai commencé a m’informer plus sur les capteurs à infrarouge. Très rapidement j’ai réaliser la difficulté que cette méthode allait introduire au projet. Par contre, j’ai fait d’autre recherche pour s’il avait d’autre personne qui avait réussi à faire capter un objet et être capable de recréé l’objet à l’ordi. Le matériel était principalement au moins deux caméras qui voyait la main en temps réelle qui transmet les informations dans un programme pour recréé la forme de la main ou des capteurs. Les deux caméras sont nécessaires non-seulement pour capter le plus possible des capteurs du gant, mais aussi de pouvoir faire une forme 3D.
Lien: https://www.youtube.com/watch?v=3s-2XL7ojRg, https://forum.processing.org/two/discussion/14720/how-to-created-a-hand-like-structure-in-processing, https://www.youtube.com/watch?v=vduzIFWUCJI&feature=share&fbclid=IwAR2yDvaKIgR-uNV1Y5XcEGuvGzY1VzTmMujowt1iJmQB-4VmYrmL4QKlook
(2020-02-16): Aujourd’hui on a commencé à parler de plusieurs problème qu’on pourrait rencontrer pendant le développement des capteurs infrarouges et on a conclu que ça allait être trop demandant avec le temps restreint qu’on a. Alors, on s’est retourné vers les Flexs sensors. Par contre, notre prof nous a parlé vite fait des électrolytes. Je n’avais déjà entendu parlé, mais il faudrait que je fasse d’autre recherche.
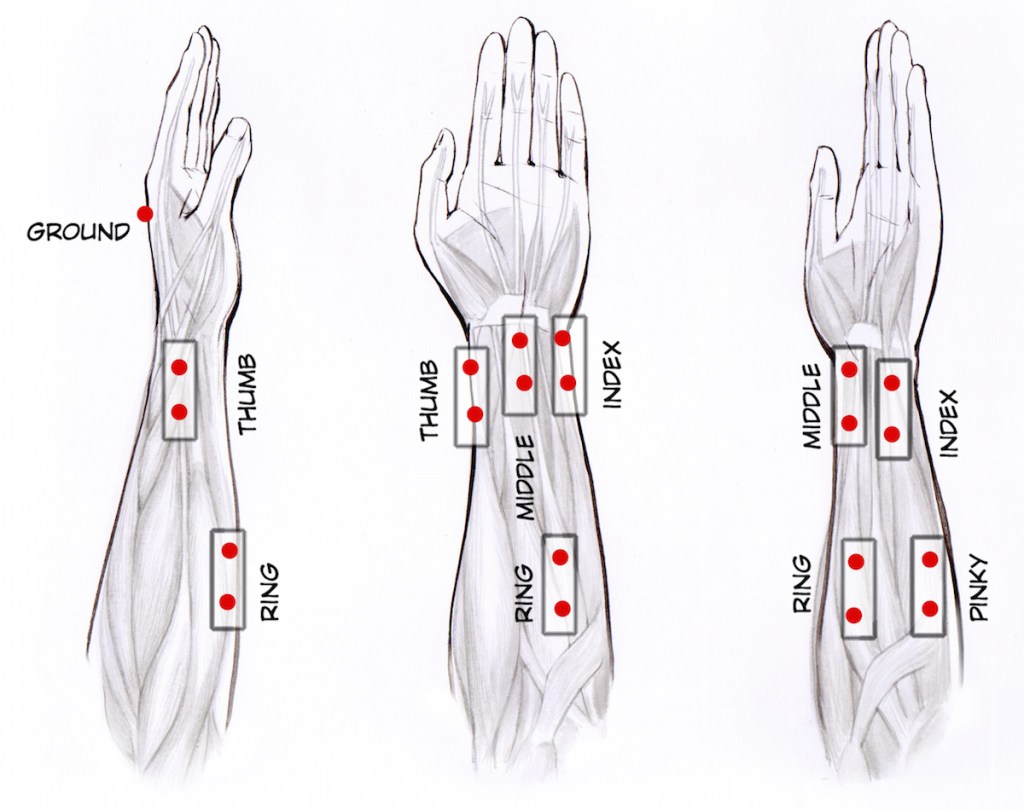
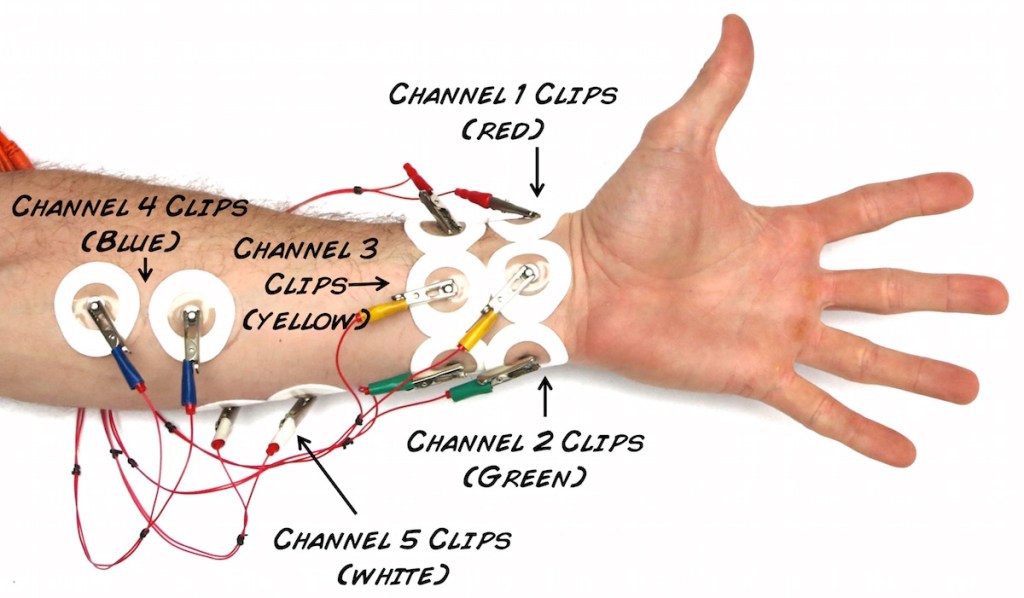
(2020-02-17): J’ai rechercher plus sur les électrodes. J’ai retrouvé le TED talk que j’avais regardé au passer. Cela montrait que c’était possible de réaliser la main contrôlé par nos contraction de muscle. Par contre, nous voulons être capable de contrôler chaque doigt individuellement. Pour être capable de contrôler chaque doigt distinctivement c’est très difficile, car nos muscle utilisé pour contracter nos doigts sont tous un à côté de l’autre. Les capteurs ne pourraient pas bien détecter la différence entre la contraction d’un index et d’un majeur.
Lien: https://www.youtube.com/watch?v=rSQNi5sAwuc&list=PLpkY1KMJnJzwbzqYWIa5beBQssthZe5kY&index=4&t=177s , https://www.youtube.com/watch?v=2vJ3qqQ4Rvs&list=PLpkY1KMJnJzwbzqYWIa5beBQssthZe5kY&index=7&t=0s , https://www.youtube.com/watch?v=0eoGGj9SDeE&list=PLpkY1KMJnJzwbzqYWIa5beBQssthZe5kY&index=8&t=0s , https://www.ncbi.nlm.nih.gov/pmc/articles/PMC5764314/ ,
(2020-02-20): Pendant les derniers jours, j’ai commencé à faire de la recherche pour trouver une nouvelle façon de capter les mouvements des doigts. On a décidé de faire un retour vers l’arrière et aller avec les flexs sensors. Par contre, on s’est dit qu’on voulait avoir une bonne précision des les déplacements des doigts. Pour y arriver nous allons utiliser deux servo moteur par doigt. Pour capter les mouvements des doigts nous allons avoir un flex sensor au bout du doigt et un angle sensor par dessus la jointure du doigt. Alors, le doigt sera décomposer de deux mouvements un pour les deux jointures du haut et l’autre pour la jointure du bas. Donc, le but de notre projet a du être réécrit. Il faudra aussi planifier 10 servos moteurs pour les 5 doigts de la main. Pour le gant il nous faudra 5 flexs sensors et 5 angles sensors. Après cette décision de faire notre projet avec tout ce matériel, je me posais la question si le Arduino pouvait avoir au t’en de chose connecté. Alors, j’ai découvert un multiplexer ce qui permet de gérer tous les données reçues et envoyées. Cette objet permettrait de prendre tous les données reçues et le renvoyer en t’en qu’une seule en alternant à travers tous les capteurs.
Lien: https://en.wikipedia.org/wiki/Multiplexer
(2020-02-22): J’ai réaliser que ma description de la et des jointures n’était pas très claire. Alors, j’ai regarder l’anatomie de la main pour savoir les noms de chaque partie du doigt. Pour mieux expliquer, la phalange distale et la phalange moyenne seront contrôlées par le premier servo moteur du doigt. Puis pour la phalange proximale, elle sera contrôlée par le deuxième servo moteur du doigt. J’ai aussi pris les dimensions de ma main pour voir comment gros est le flex sensor par rapport à nos main. Aussi, pour avoir les dimension du gant.


(2020-02-23): J’ai fait un prototype d’un doigt de la main robotique. Je l’ai fait avec un morceau de plastique qui était dans mon garage. Je l’ai découper pour qu’il ait des jointures avec une scie de table. J’ai aussi drillé des trous pour pouvoir passer une corde qui n’était pas le meilleur choix, car elle reste prise dans le plastique. Ce prototype nous permet de bien comprendre comment va fonctionner la main robotique. La corde représente le déplacement du premier servo moteur qui est la phalange distale et la phalange moyenne.


(2020-02-24): Aujourd’hui j’ai montré a mon coéquipier mon prototype du doigt robotique. On a aussi continué la répartition des tâches pour le projet. Cela inclus le calendrier et la description du projet pour l’analyse préliminaire. On a aussi déterminé les pièces manquantes dont quelle type de servo moteur utiliser. Pour finaliser le coût du projet. Aussi, avec notre professeur nous avons déterminé qu’on devrait commencer à faire le gant qui capte les mouvements de nos doigts avant de faire la main robotique.
(2020-02-27): J’ai continué à travailler sur la documentation de notre projet, ce qui incluaient: la description du projets, le calendrier, le coût, les pièces, ce qu’on sait déjà et ce qu’on ne sait pas.
(2020-03-02) au (2020-03-06) : Pendant cette semaine j’ai plutôt avancé dans la documentation de notre projet. Nous avons réussi à trouver tous les pièces nécessaire pour faire notre gant et notre main robotique. Bien sur nous pensons imprimer des pièces 3D pour que le gant ait des support pour tenir les capteurs. Nous imprimerons aussi la main robotique en 3D. Donc, se coût de l’imprimante 3D n’est pas dans le coût de nos pièces. Cependant, le coût de tous nos autres pièces sont fait avec le but et la description de notre projet. Alors, notre analyse préliminaire est maintenant compléter et nous pouvons attaquer de l’avant vers le commencement de notre projet.
Voici notre document complété:
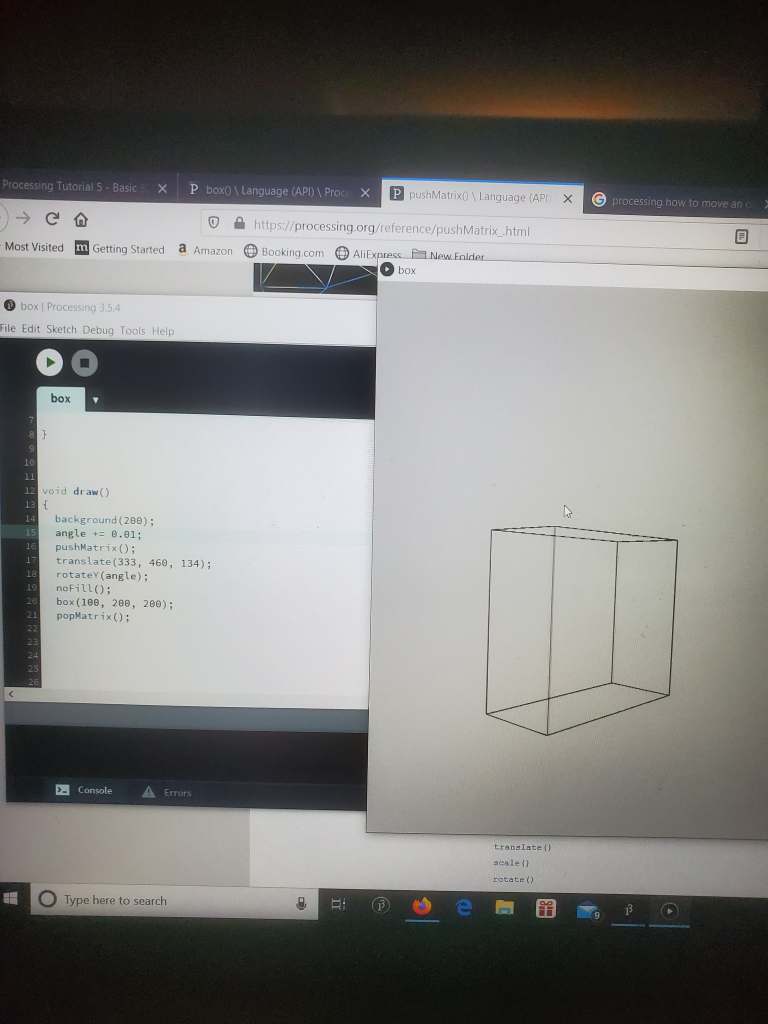
(2020-03-07) : Aujourd’hui j’ai commencé à me familiariser avec Processing pour pouvoir faire une main 3D. J’ai commencé par un seul bloc et j’ai jouer avec les paramètres pour pouvoir voir comment cela fonctionne. Je regarde certain tutorial en ligne et j’essaie de comprendre chaque partie du code. J’ai réalisé que le monde dans leur tutorial n’est pas clair lorsqu’il vient le temps d’expliquer chaque ligne de leur code. Cependant, le site officiel de Processing me permet de rechercher les fonctions avec des explications beaucoup plus clair à comprendre.
(2020-03-08) : Je continue l’avancement de mon apprentissage de Processing. Par contre, l’avancement ne se fait aussi vite que je le veux. Je suis rendu capable de faire apparaitre des cubes et un cercle, mais le positionnement de ces cubes est difficile à prédire. Car j’essaie de comprendre et visualiser le translate. Le translate est, de la façon que j’ai compris, un point en l’aire qui n’apparait pas à l’écran, mais qui peut faire apparaitre l’objet que tu veux à cette endroit.
(2020-03-9) et (2020-03-10) : Maintenant que j’ai mieux compris le translate. Je suis maintenant capable de faire apparaitre les cubes, qui représente les phalanges des doigts, et faire apparaitre les cercles, qui représente les jointures. Je suis aussi capable de faire une rotation des cubes pour représenter le mouvement du doigt. Par contre, la rotation se fait seulement à partir du centre du cube, ce qui ne serait pas possible pour un doigt humain. Alors, j’ai compris qu’il faut que je mette un translate avant la rotation pour pourvoir le faire tourner par rapport à mon point de rotation. Bien sûr, après ma incrémentation de rotation il faut refaire un autre translate pour revenir à la même place pour faire l’écriture du cube ou des autres objets, sinon tous les objets seraient d’écalé.
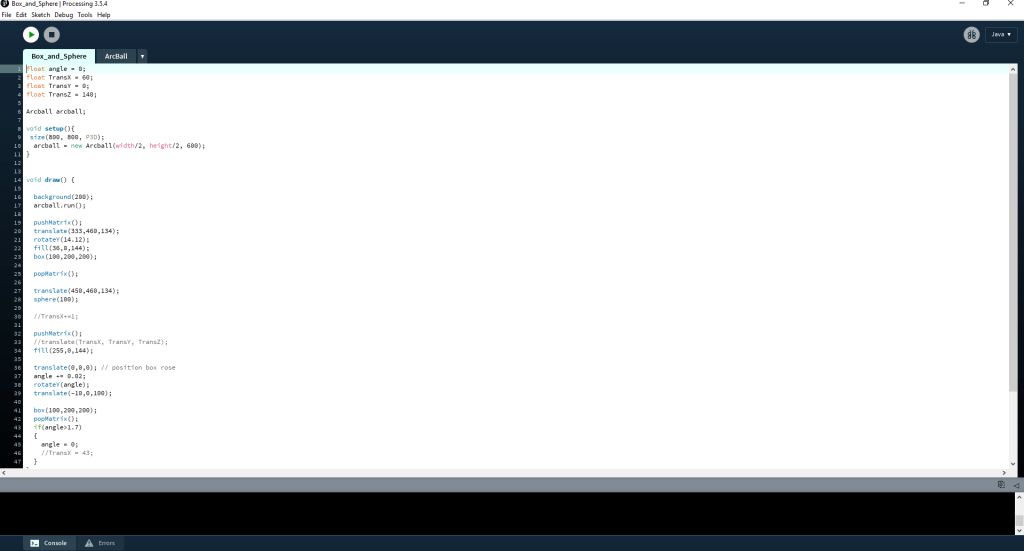
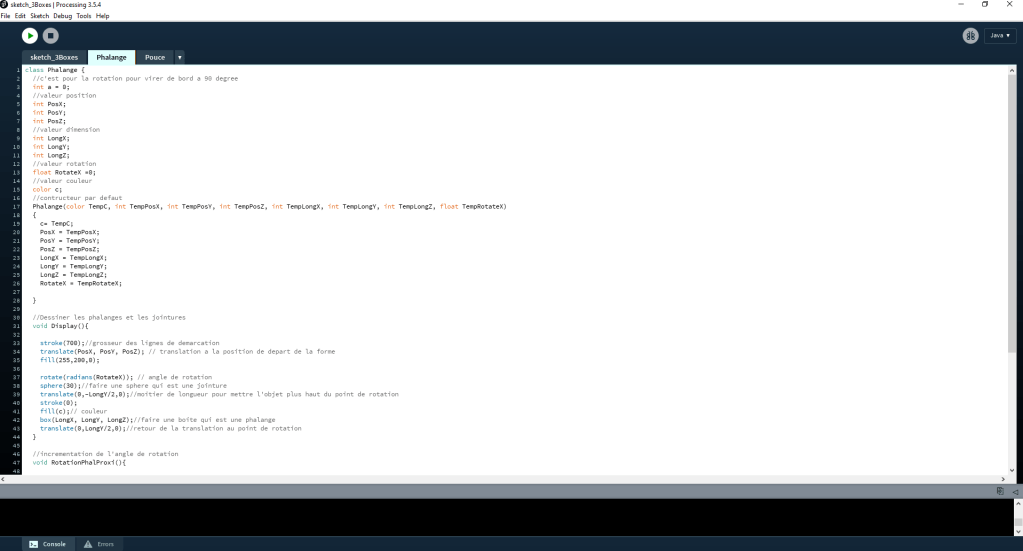
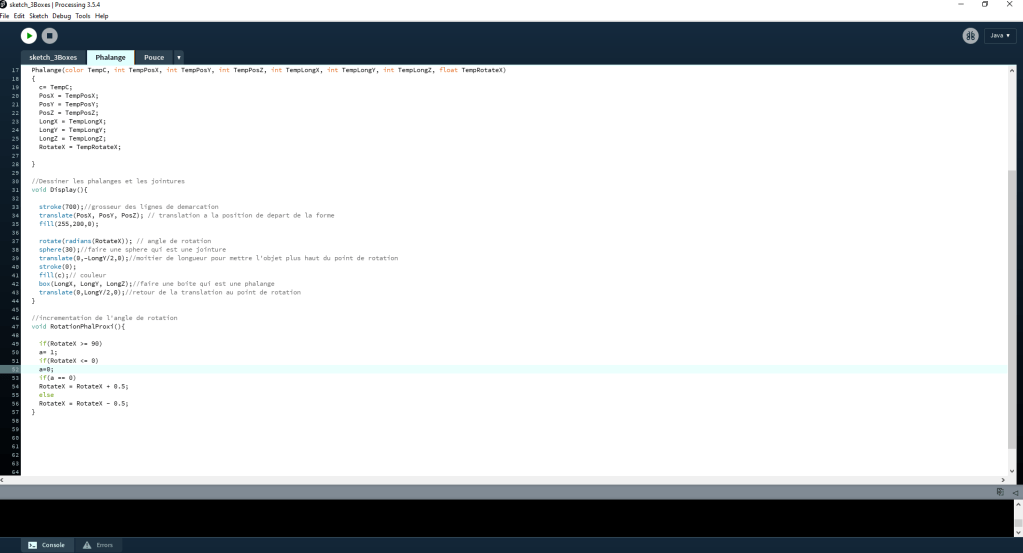
Voici mon programme, il contient un peu de code des exemples qui viennent avec Processing pour déplacer la caméra.
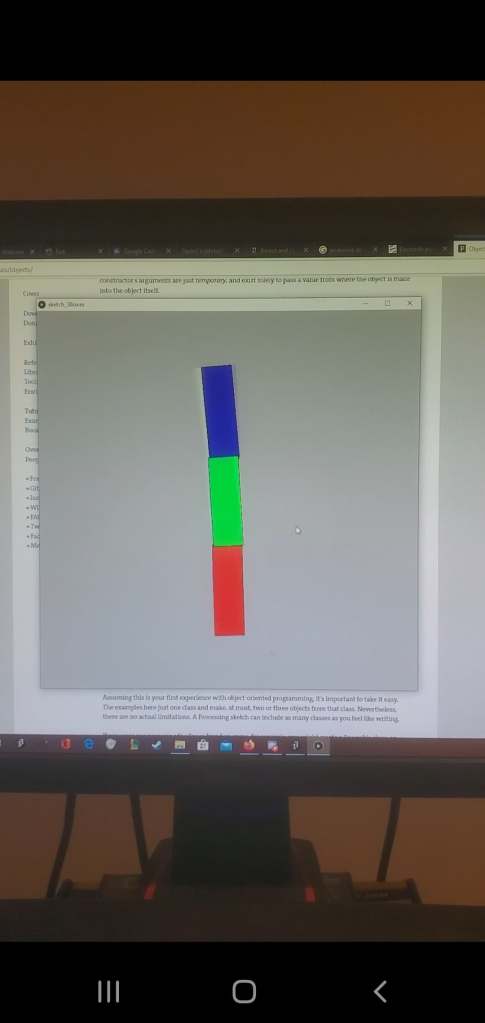
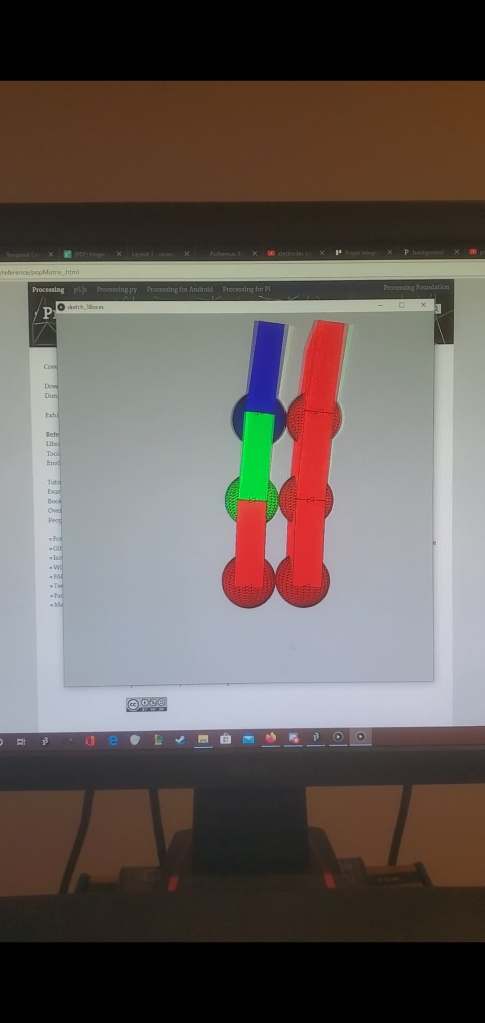
Voici un image de mon programme où la rotation de la phalange se fait dans le bas du cube et non au centre du cube. Ils ne sont collés ensemble les phalanges, car j’ai oublié un translate vers le haut:
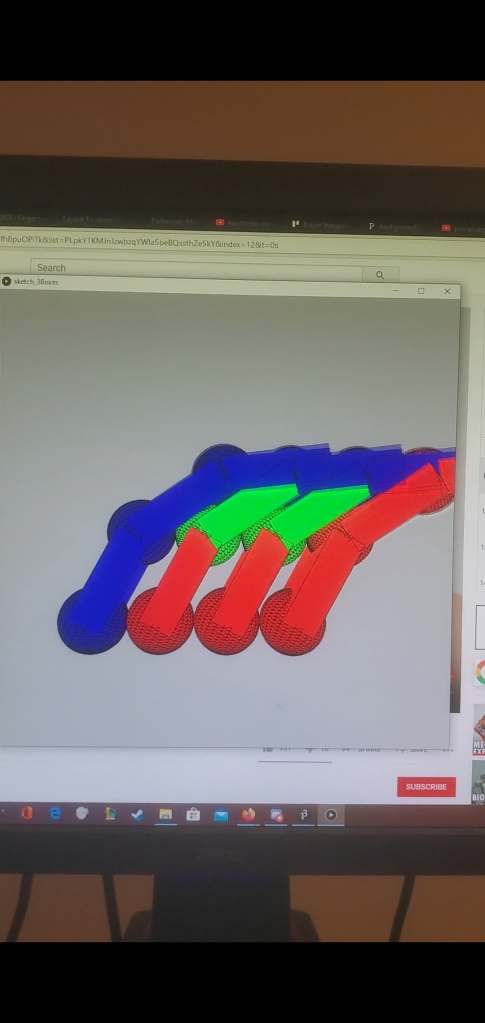
Voici la fois ou j’ai essayer de faire le doigt en entier. Ça n’a pas fonctionné comme prévu la rotation se faisait encore dans le centre du cube(Je ne peux pas mettre de vidéo, mais voici des photos):
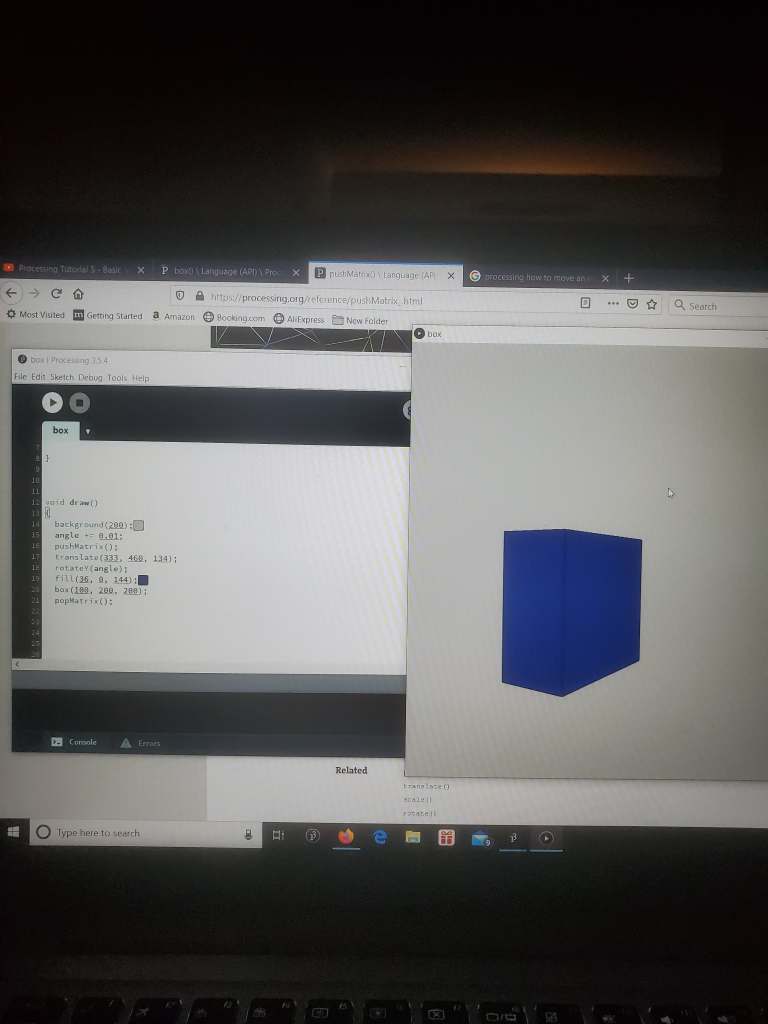
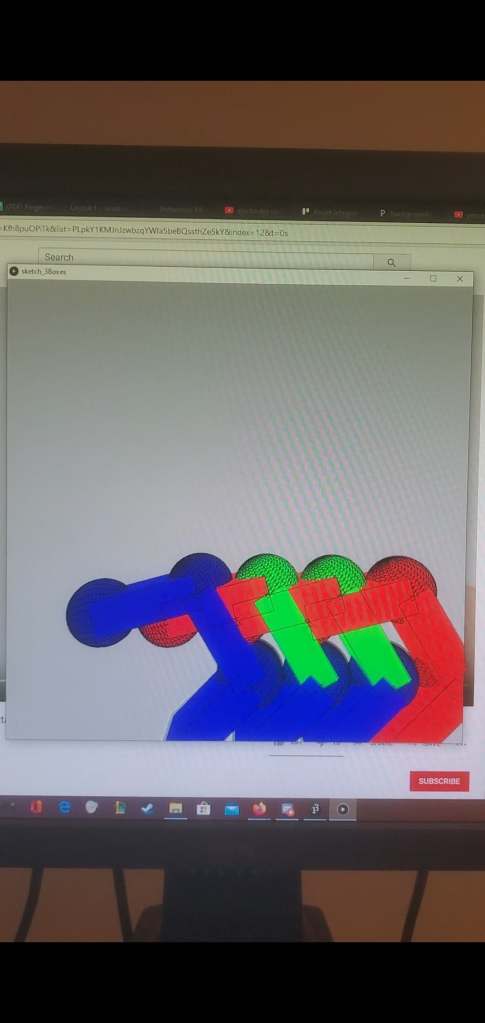
À la place d’essayer de faire la rotation des trois phalanges en même temps je l’ai fait pour une phalange et la rotation se fait maintenant au bas du cube et non au centre:
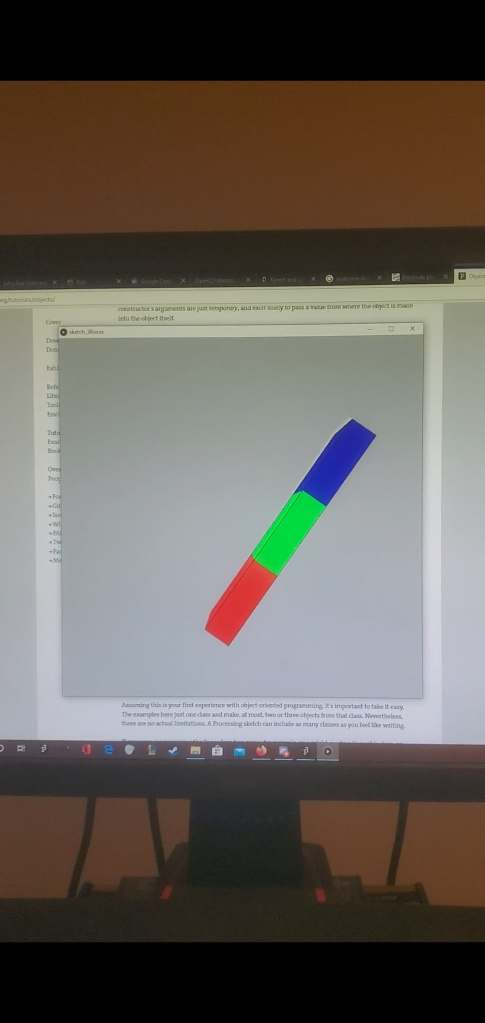
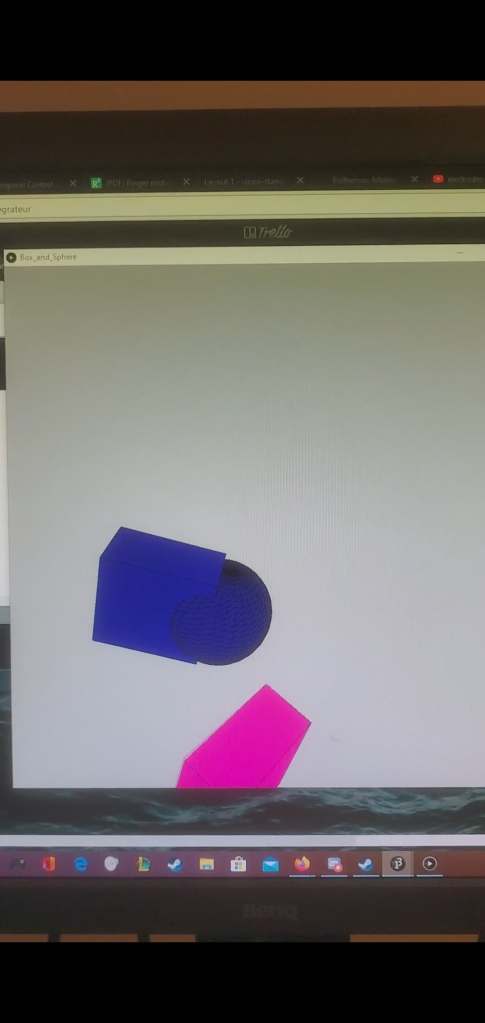
J’ai réussi à faire la rotation des trois phalanges à leur endroit distinct et j’ai ajouté les boules pour faire les jointures. Après je me suis dit que la rotation d’un doigt était bon, mais la je devrait faire un autre doigt. Alors, j’ai fait un autre doigt, par contre le deuxième doigt faisait la rotation autour du premier doigt. Je me suis rappeler de la fonction popMatrix() et de pushMatrix(). Cette fonction ma permis de séparer mes doigts et de les mêttres distincts. Alors, voici le deuxième doigt:
Maintenant que le deuxième doigt faisait bien la rotation j’ai mis quatre doigt. Ajouter des doigts était facile à cause de ma class de phalange que j’avais besoin de dire les contrainte de la grosseur des doigts et le restant se faisait toute automatiquement comme les autres doigts.
Voici ma fonction pour les doigts:
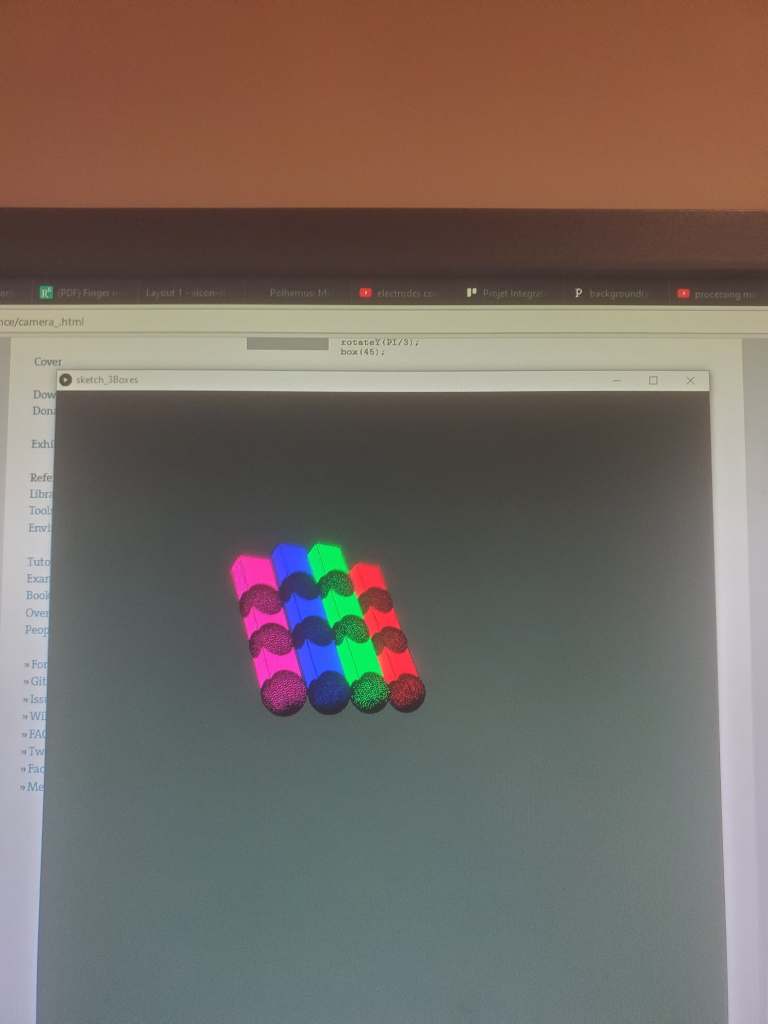
Là j’ai fait la rotation de la caméra et mis les doigts un à côté de l’autre avec des couleurs distincts:
Maintenant que tout fonctionne j’ai ajouté un pouce que lui la rotation est différente alors j’ai du faire une nouvelle fonction pratiquement pareil à celle des phalanges. Aussi, j’ai ajouté la paume de la main qui est simplement une boite:
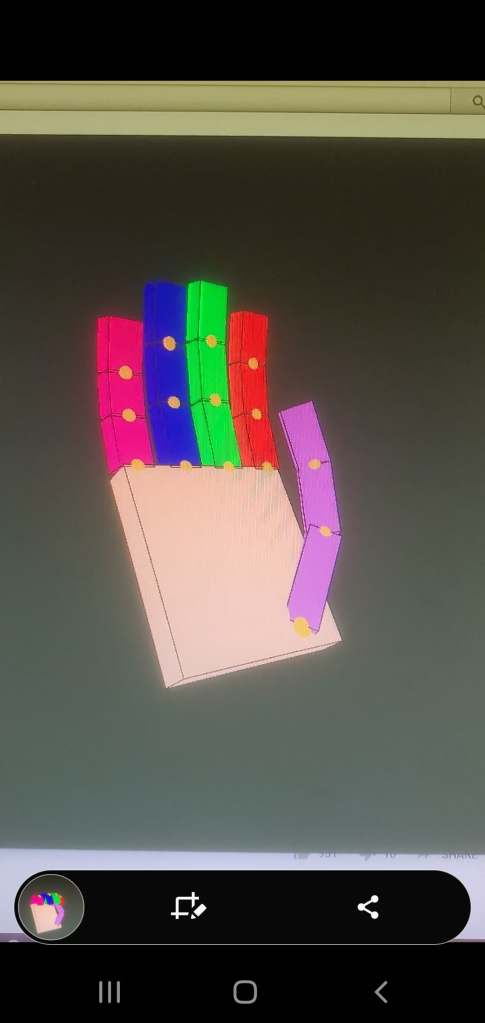
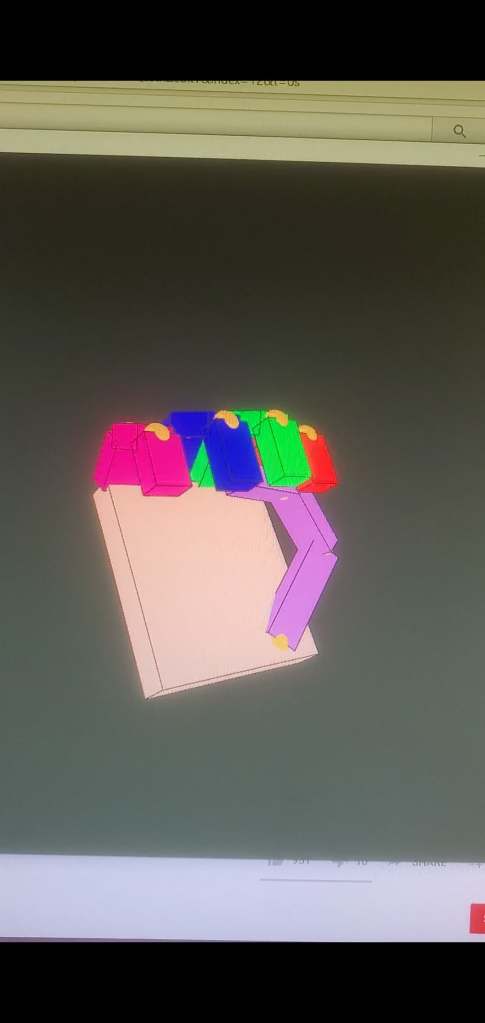
La main en Processing est compléter il va juste rester à mettre des variables qui viennent du Arduino pour la contrôler.
Voici le code pour tout mes projets:
